|
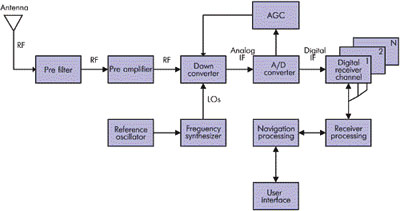
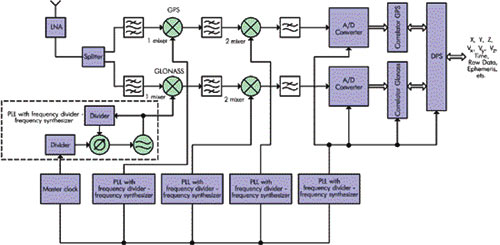
Е. Поваляев, С. Хуторной Системы спутниковой навигации ГЛОНАСС и GPS. Часть 2. Аппаратура потребителей системыВ первой части цикла было дано общее описание при╦мника сигналов спутниковых систем ГЛОНАСС/GPS. В данной статье рассмотрим вопросы построения аппаратуры потребителя спутниковых систем ГЛОНАСС и GPS, в частности, радиочастотный тракт при╦мника и аналого-цифровой преобразователь как интерфейсный блок между цифровым коррелятором и радиочастотной частью. Навигационный при╦мник предназначен для определения пространственных координат, вектора скорости, текущего времени и других навигационных параметров, полученных в результате при╦ма и обработки радиосигналов от навигационных спутников. На вход при╦мника поступают радиосигналы от спутников, находящихся в зоне радиовидимости потребителя. Так как для решения навигационной задачи необходимо измерить псевдодальность и псевдоскорость относительно минимум 4-х спутников, то навигационные при╦мники целесообразно строить в многоканальном исполнении (4-12 каналов в обычных и 20√48 каналов в 2-частотных совмещ╦нных при╦мниках). Современные навигационные при╦мники являются аналого-цифровыми системами [1]. Переход на цифровую обработку осуществляется на одной из промежуточных частот, при этом имеет место тенденция к е╦ повышению. Увеличение промежуточной частоты для системы ГЛОНАСС обусловлено желанием разработчиков перенести разделение по различным каналам в цифровую часть. На рис. 1 представлена функциональная схема навигационного при╦мника ГЛОНАСС/GPS [2]. Рисунок 1. Функциональная схема навигационного при╦мника ГЛОНАСС/GPS
Как правило, типовой при╦мник сигналов систем ГЛОНАСС/GPS состоит из четыр╦х функциональных частей:
В качестве антенны обычно используется микрополосковая антенна, обладающая малой массой и габаритными размерами и простотой изготовления. Микрополосковая антенна состоит из двух параллельных проводящих сло╦в, раздел╦нных диэлектриком. Нижний проводящий слой является заземл╦нной плоскостью, а верхний - излучателем антенны. По форме излучатель может быть прямоугольником, эллипсоидом, пятиугольником и так далее. Микрополосковая антенна обеспечивает всена-правленный при╦м сигналов [1]. Типичные характеристики антенны (для рабочего диапазона частот 1570√1625 МГц):
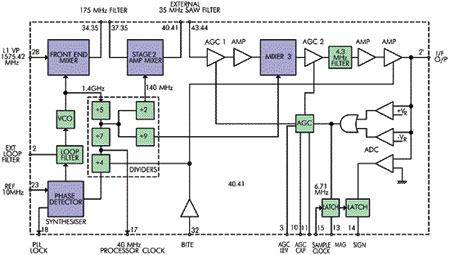
В антенне может быть установлен предварительный усилитель. Он нужен для усиления сигнала до такого уровня, чтобы при передаче по кабелю (20√40 м) до входа в радиочастотную часть при╦мника сигнал был достаточно мощным. Предварительный усилитель обеспечивает в рабочем диапазоне частот коэффициент усиления Ку ~ 30√40 дБ и коэффициент шума Кш Обычно под радиочастотной частью понимают совокупность входных усилителей и фильтров (Pre filter, Pre amplifier), систему 2- или 3-кратного гетеродинирования (Down converter) и АЦП (A/D converter). При использовании многоуровневых АЦП возникает необходимость в автоматической регулировке усиления (Automatic Gain Control - AGC). В радиочастотной части сигналы, принятые антенной, предварительно усиливаются и фильтруются во всей полосе (от 1570 до 1620 МГц для совмещ╦нных при╦мников) несущих частот с помощью предварительного усилителя и полосового фильтра. Принятый высокочастотный сигнал в радиочастотной части гетеродинируют - переносят на промежуточную частоту, дискретизируют, и в цифровом виде сигнал поступает в коррелятор. В корреляторе в цифровой форме формируются отсч╦ты синфазных I(k) и квадратурных Q(k) компонент сигнала, которые являются основой для работы алгоритмов поиска сигнала по частоте и задержке, слежения за фазой сигнала и выделения навигационного сообщения. Отсч╦ты I(k) и Q(k) поступают в сигнальный процессор, который, обрабатывая их, формирует значения псевдодальности и псевдофазы, решает навигационную задачу, формирует управляющий сигнал для ФАП каждого канала для замыкания петли и управляет периферией. Помимо этого, коррелятор может формировать измерительную информацию, которая затем будет использована для вычисления псевдодальности и псевдофазы. Для при╦мников системы GPS с кодовым разделением каналов (сигналов различных спутников) схема на рис. 1 отображает структуру при╦мника в целом, то есть радиочастотная часть является общей и разделение по спутникам производится уже в цифровом блоке коррелятора. Для при╦мников системы ГЛОНАСС или совмещ╦нных при╦мников схема радиочастотной части может существенно отличаться. Как и любое радиотехническое устройство, навигационный при╦мник рассчитывают, выбирая коэффициент шума, коэффициент усиления каждого каскада и добротность полосовых фильтров. Эти характеристики определяются исходя из уровня мощности сигнала на входе антенны, чувствительности при╦мника и его динамического диапазона. Существует несколько вариантов построения радиочастотных частей совмещ╦нного навигационного при╦мника. Первоначально была предложена многоканальная схема, в которой каждый радиочастотный канал при╦мника настроен на частоту одного из видимых спутников GPS или ГЛОНАСС. Похожую структуру имеет радиочастотный блок, построенный на микросхеме, вы-пускаемой фирмой Zarlink (Gec Ples-sey) GP1010, GP2010 (рис. 2) [3]. Рисунок 2. Функциональная схема радиочастотной части, выпускаемой фирмой Zarlink (Gec Plessey), GP1010, GP2010
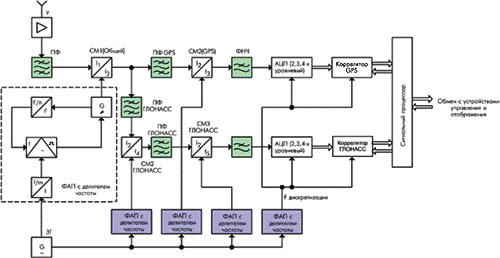
Радиочастотная часть для GPS-при╦мников производится многими компаниями, такими как Zarlink, Sirf, Tchip, TI, Thomson и так далее. Однако нам не известны производители полноценных радиочастотных микросхем для совмещ╦нных при╦мников. С помощью микросхемы Zarlink (Gec Plessey) может быть реализован Глонассовский при╦ник, поэтому рассмотрим е╦ структуру более подробно. В данной схеме реализовано тр╦х-уровневое гетеродинирование. Промежуточные частоты равны fint ermediate 1 = 1400 МГц, Частота дискретизации - 5,7 МГц. Выходной АЦП работает в режиме преобразователя частоты, частота входного сигнала АЦП ~ 4,3 МГц, поэтому на выходе получается сигнал разностной частоты ~ 1,4 МГц. Микросхема предназначена для гетеродинирования сигнала GPS, однако е╦ можно использовать и для ГЛОНАСС. Для этого необходимо разбить широкий спектр GLONASS на несколько полос, используя разные частоты гетеродинирования для каждой полосы общего спектра таким образом, чтобы в спектрах сигнала, прошедших через выходной фильтр, присутствовали все литеры. Подобный при╦мник позволяет измерять псевдодальности и псевдофазы для спутников системы GPS, однако сформированные измерения псевдофазы использовать для обработки сигналов спутников ГЛОНАСС не представляется возможным. Схема при╦мника построена таким образом, что весь узкий спектр GPS попадает в один радиочастотный тракт, а широкий спектр ГЛОНАСС разбивается на три диапазона, каждому из которых соответствует свой радиочастотный тракт. В результате все спутники GPS имеют одинаковые фазовые искажения, так как общий сигнал проходит по одному тракту. Сигналы от спутников ГЛОНАСС, попадающие в разные диапазоны спектра, имеют разные фазовые искажения, так как проходят через разные радиочастотные части. Поэтому для использования фазовых измерений по ГЛОНАСС в при╦мнике, построенном по такой схеме, необходимо оценить искажения, вносимые каждым каналом. Фазовые искажения в каждом канале можно оценить и вносить в результаты измерений. Однако величина искажений зависит от многих малостабильных факторов, таких как температура, влажность и так далее. Таким образом полностью учесть величину искажений невозможно. Поэтому была предложена другая схема (рис. 3). Рисунок 3. Функциональная схема радиочастотной части совмещ╦нного при╦мника ГЛОНАСС/GPS
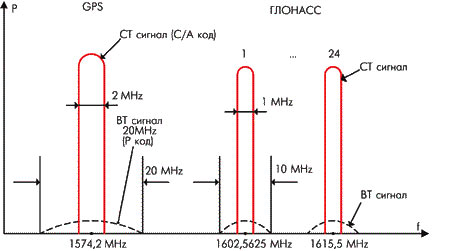
В данной схеме входной сигнал, состоящий из сигналов GPS и Glonass, поступает на вход совмещ╦нной антенны. Входной сигнал GPS + GLONASS лежит в диапазоне 1570,0√1616 МГц (рис. 4). После этого сигналы фильтруются полосовым фильтром и усиливаются антенным усилителем. Далее сигнал поступает в радиочастотную часть при╦мника, где он фильтруется, усиливается и гетеродинируется первым гетеродином. В результате первого гетеродинирования получаем сумму сигналов GPS и GLONASS, лежащих в диапазоне 39 (GPS) и 71√85 МГц (GLONASS). Далее с помощью полосового фильтра GPS и GLONASS сумма сигналов разделяется на два тракта. В первом тракте выделяем GPS-сигнал с помощью полосового фильтра. Сигнал во втором тракте мы пропускаем через фильтр верхних частот, чтобы отрезать все гармоники выше 90 МГц (зеркальная помеха). Далее сигнал во втором тракте мы подвергаем гетеродинированию foscillator 2 = 121,44 МГц. Спектр входного сигнала 39√85 МГц переносится в диапазон 82,44 МГц (GPS) и 50,44√36,44 МГц (GLONASS), то есть спектр сигнала "переворачивается". Далее с помощью по-лосового фильтра выделяют GLO-NASS-сигнал. Рисунок 4. Спектры сигналов ГЛОНАСС/GPS
Далее сигнал в обоих трактах GPS и GLONASS гетеродинируют второй раз частотой 34,98 МГц. В первом тракте получаем GPS-сигнал на частоте 4 МГц, во втором тракте получаем совокупность всех сигналов Глонасс, спектр которой составляет 15,46√1,46 МГц. Каждый сигнал в обоих трактах дискретизируется частотой fsampling = 34,98 МГц, квантуется с помощью двухуровневого квантователя и отсылается в коррелятор. Отметим, что все сигналы Глонасс проходят по одному тракту. Поэтому фазовые задержки всех каналов идентичны. Предложенная на рис. 3 схема позволяет проводить фазовые измерения, пригодные для последующей обработки. Однако е╦ помехозащищ╦нность можно значительно улучшить, построив схему при╦мника с уч╦том следующих моментов [4]:
Такая схема построения при╦мника позволяет значительно повысить его помехозащищ╦нность. Паразитные помехи и помехи в полосе GPS или GLO-NASS не попадают в соседнюю полосу. Такая стратегия была реализована в при╦мнике компании Ashtech (рис. 5). Рисунок 5.Функциональная схема при╦мника фирмы Ashtech
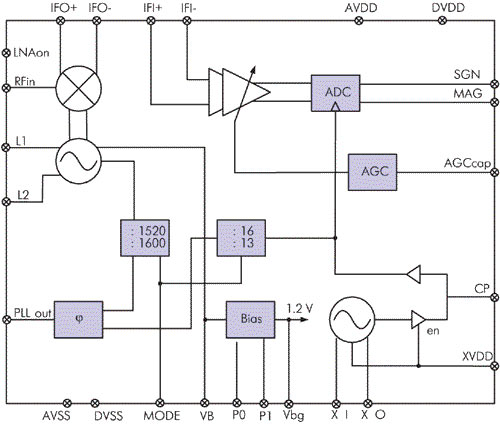
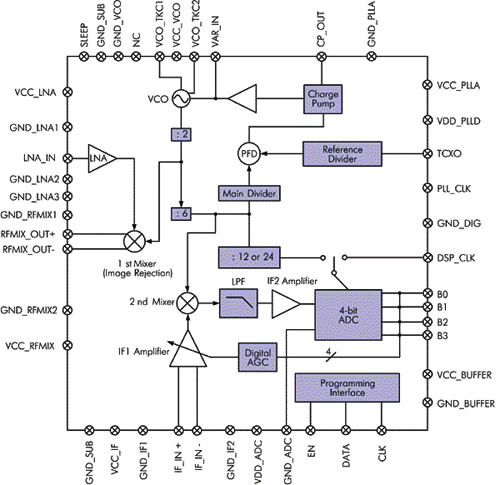
Одним из принципиальных моментов разработки навигационного при╦мника является выбор частотного плана. Под частотным планом подразумевается выбор задающего генератора, частот гетеродинирования и дискретизации для того, чтобы минимизировать уровень паразитных гармоник, возникающих в схеме из-за различных нелинейностей, шумов и влияния цифровой части при╦мника. Для этого предварительно выбирают генератор, промежуточные частоты для гетеродинирования, фильтры и рассчитывают коэффициенты усиления всех каскадов. Далее анализируют получившуюся архитектуру и выявляют все нелинейные элементы, в результате работы которых могут возникать гармоники, попадающие в спектр сигнала. Варьируя промежуточные частоты, частоту дискретизации, характеристики смесителей, усилителей и фильтров, подбирают такую конфигурацию, которая обеспечивает оптимальный при╦м сигнала, то есть в спектре сигнала появляются дальние гармоники от нелинейных преобразований, которые малы и не оказывают серь╦зного влияния на сигнал. Для GPS-при╦мников выпускается большая номенклатура различного рода радиочастотных блоков. В качестве примера рассмотрим блок-схемы микросхем радиочастотных трактов, предлагаемых фирмами Tchip (TJ1004) и Texas Instrument (TRF5001). Блок-схема микросхемы TJ1004 фирмы Tchip представлена на рис. 6. Рисунок 6.Блок-схема ИС радиочастотного тракта TJ1004 фирмы Tchip
TJ1004 - это полностью законченный радиочастотный блок для при╦мника системы GPS для частоты L1. TJ1004 содержит преобразователь частоты, на выходе которого получаем сигнал промежуточной частоты ~ 20,46 или 18,94 МГц. В состав кристалла входит гетеродин (управляемый генератор, построенный на основе контура ФАП), УПЧ (усилитель промежуточной частоты), контур АРУ (автоматической регулировки усиления сигнала, AGC) и 2-бит АЦП. Сигнал от внешнего малошумящего усилителя (LNA TJ1001) и полосового фильтра поступает на преобразователь частоты. Низкое энергопотребление и миниатюрные размеры TJ1004 дают возможность использовать его в различного рода совмещ╦нной аппаратуре. Другой пример интегрального исполнения радиочастотного блока предлагает фирма Texas In-strument. В кристалле TRF5001 (рис. 7) реализован малошумящий уси-литель входного сигнала (LNA). С выхода LNA сигнал подвергается двукратному преобразованию частоты и внешней фильтрации. Первая промежуточная частота составляет 222,54 МГц, вторая - 2,94 МГц. После внешней фильтрации и внутреннего усиления сигнал поступает на встроенный 4-бит АЦП. Коэффициент усиления УПЧ перед АЦП регулируется с помощью встроенного контура АРУ (AGC). Рисунок 7.Функциональная схема ИС радиочастотного тракта при╦мника GPS-сигналов TRF5001 фирмы Texas Instrument
Значительной проблемой при проектировании ГЛОНАСС/GPS-при╦мников является уч╦т влияния цифровой части при╦мника на радиочастотную. Для уменьшения этого влияния обеспечиваются сильная развязка и экранирование радиочастотной части. Кроме этого, частоту дискретизации выбирают кратной частоте задающего генератора и всем промежуточным частотам. Выбор числа уровней квантования в АЦП определяется, в основном, типом помех на входе при╦мника. Если основным видом помех является белый гауссовский шум, то возможно применение малоуровневого квантования, вплоть до бинарного. Если помеха узкополосная стационарная, то необходимо большее число уровней квантования [5]. Согласно материалам, привед╦нным в [5], потери при применении бинарного квантования в условиях аддитивного белого гауссовского шу-ма не превышают 1 дБ при частоте дискретизации порядка 30...40 МГц. Дальнейшего снижения потерь можно добиться, применяя 3- или 4-уровневое квантование. Однако, принимая во внимание то, что увеличение числа уровней квантования приводит к почти такому же увеличению аппаратных затрат на реализацию коррелятора, применение многоуровневого квантования в условиях, когда на вход при╦мника поступает смесь сигнала и белого гауссовского шума, нецелесообразно. Совершенно иная картина наблюдается при наличии узкополосных стационарных помех. С 2005 года система GLONASS должна перейти на диапазон излучаемых спутниками частот 1598,1...1604,3 МГц (6,2 МГц). На сегодняшний день по плану диапазон занимаемых частот должен быть перенес╦н в область 1605,4...1612,12 МГц. При ориентации на данную частоту возможно возникновение проблем, связанных с тем, что некоторые спутниковые системы излучают на частотах, близких к данной или находящихся в данном диапазоне:
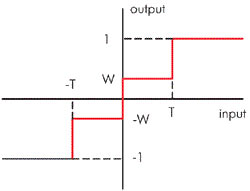
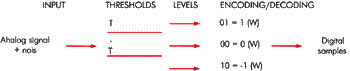
При наличии взаимных помех однобитное квантование да╦т потери порядка 7 дБ, по сравнению с идеальной линейной обработкой (без квантования или с числом уровней, близким к бесконечности). Для компенсации этих потерь применяют более сложные методы квантования, чем однобитное. Как сказано выше, применение большего числа уровней квантования приводит к существенному возрастанию аппаратных затрат на реализацию коррелятора. Компромиссом в этом случае может стать 2-бит квантование. 2-бит квантование характеризуется двумя параметрами - весовым коэффициентом W и порогом T (рис. 8). В [4] приводятся результаты теоретических и экспериментальных исследований различных типов 2-бит квантования:
Рисунок 8.Выбор весового коэффициента и порога для 2-бит квантования
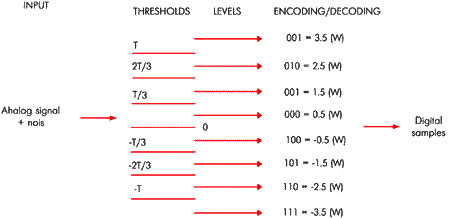
В [6] приводятся данные по уровню порога и весовым коэффициентам для наиболее часто используемых разновидностей квантования: 2-бит (рис. 9) и 3-бит (рис. 10). Рисунок 9.Выбор уровня порога и весовых коэффициентов при 2-бит квантовании
Рисунок 10.Выбор уровня порога и весовых коэффициентов при 3-бит квантовании
По результатам теоретических и экспериментальных исследований оптимальным типом 2-бит квантования в условиях взаимных помех является тр╦х-уровневое квантование, когда W = 0. В следующей статье цикла будут рассмотрены проблемы, связанные с многолучевым распространением сигналов навигационных спутников, и методы борьбы с многолучевостью в навигационных системах ГЛОНАСС/GPS. Литература
|