|
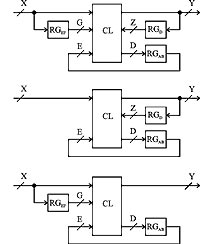
В. Соловьев, А. Климович Синтез на ПЛИС совмещенных моделей конечных автоматовРассматривается новый подход к проектированию конечных автоматов на ПЛИС, когда в рамках одной структурной модели, названной совмещенной, объединяется несколько различных моделей конечных автоматов. Это позволяет наиболее полно использовать архитектурные возможности ПЛИС и положительные качества каждой модели для реализации конечных автоматов. Экспериментальные исследования показали, что применение метода синтеза совмещ╦нных моделей, по сравнению с методами пакетов MAX+PLUSII фирмы Altera и WebPack фирмы Xilinx, позволяет снизить стоимость реализации, в среднем, в 2√3,5 раза, а для отдельных примеров ≈ в 9 раз, а также повысить быстродействие, в среднем, в 2 раза, а для отдельных примеров ≈ в 6 раз. Введение В предыдущих статьях данной серии были рассмотрены оригинальные структуры конечных автоматов, позволяющие использовать триггеры выходных макроячеек ПЛИС [1] (автоматы классов C и D) и входных буферов ПЛИС [2] (автоматы классов E и F) в качестве элементов памяти конечных автоматов. Автоматы классов C-F показали высокую эффективность как по стоимости реализации, так и по быстродействию. Однако на практике конечные автоматы классов C-F в "чистом" виде встречаются редко. Обычно синтезируемый конечный автомат частично обладает свойствами сразу нескольких классов автоматов C-F. Поэтому возникает необходимость совмещения в рамках одной модели нескольких классов автоматов с тем, чтобы максимально использовать положительные качества каждого класса C-F, а также архитектурные возможности ПЛИС для реализации конечных автоматов. Совмещать в одной структуре несколько моделей различных классов конечных автоматов можно только в случае совпадения временных параметров выходных сигналов каждой модели. В противном случае, может сложиться ситуация, когда значения выходных сигналов, формируемых в одном и том же состоянии конечного автомата, на выходе схемы будут появляться в различных тактах автоматного времени. Из анализа временного функционирования автоматов классов A-F [3] следует, что допустимы следующие четыре совмещ╦нные модели конечных автоматов: ADE, AD, AE и BF. На основании этих четыр╦х совмещ╦нных моделей пут╦м установки регистров на входы и/или выходы, а также защ╦лок на входы, можно построить ещ╦ 20 совмещ╦нных моделей конечных автоматов, допускающих эффективную реализацию на ПЛИС. Структуры совмещенных моделей конечных автоматов Структуры совмещ╦нных моделей показаны на рис. 1. Здесь комбинационная схема CL реализует выходные функции и функции возбуждения элементов памяти; регистр RGEF служит для хранения кодов состояний, определяемых входными наборами (автоматы классов E и F); регистр RGD - для хранения кодов состояний, определяемых выходными наборами (автомат класса D), и регистр RGAB - для хранения кодов состояний автоматов классов A и B. В совмещ╦нных моделях содержимое входного регистра RGEF определяется значениями входных переменных множества X = {x1,...,xL}, содержимое выходного регистра RGD определяется значениями выходных переменных множества Y = {y1,...,yN} и содержимое внутреннего регистра RGAB определяется значениями функций переходов множества D = {d1,...,dR}. Коды внутренних состояний конечного автомата определяются значениями переменных множеств G = = {g1,...,gL}, Z = {z1,...,zN} и E = {e1,...,eR}, формируемых на выходах регистров RGEF, RGD и RGAB, соответственно. Рисунок 1. Структуры совмещенных моделей конечных автоматов: ADE (а), AD (б), AE и BF (в)
Отметим, что в совмещ╦нных моделях конечных автоматов регистр RGEF реализуется входными буферами, регистр RGD - выходными макроячейками, а регистр RGAB - скрытыми макроячейками ПЛИС. Кодирование внутренних состояний совмещенных моделей конечных автоматов Вначале рассмотрим кодирование внутренних состояний конечных автоматов для совмещ╦нной модели ADE, а затем уточним этот метод для моделей AD, AE и BF. Суть кодирования заключается в том, чтобы сделать все внутренние состояния различимыми между собой, то есть все коды внутренних состояний конечного автомата должны быть взаимно ортогональны. Входные и выходные наборы конечного автомата, определяемые значениями переменных множеств G = {g1,...,gL} и Z = {z1,...,zN}, частично решают эту задачу. Дальнейшее решение заключается во введении минимального числа R дополнительных переменных e1,...,eR множества E и кодировании отдельных групп состояний двоичными кодами. Пусть, как и прежде [1,2], конечный автомат задан таблицей переходов, столбцы которой имеют обозначения am, aы, X(am,aы) и Y(am,aы). Для решения задачи кодирования внутренних состояний совмещ╦нной модели ADE строится троичная матрица W. Строки матрицы соответствуют внутренним состояниям конечного автомата, а столбцы - переменным множеств G и Z. На пересечении строки, соответствующей некоторому состоянию ai, ai € A, и столбца, соответствующего переменной gj, gj € G, ставится единица, если входная переменная xj входит в условие X(ai) в прямом значении, ноль - в инверсном, и неопредел╦нное значение (дефис), если переменная xj не входит в условие X(ai), где X(ai) - условие перехода в состояние ai. Значение X(ai) определяется следующим образом: если все переходы в состояние ai, ai € A, осуществляются под воздействием одного и того же входного набора X(am,ai), то полагается X(ai) := := X(am,ai), иначе полагается X(ai) := пустое множество. На пересечении строк, соответствующих состоянию ai, ai € A, и столбца, соответствующего переменной zj, zj € Z, ставится единица, если yj € Y(ai), и ноль в противном случае, где Y(ai) - подмножество выходных переменных, принимающих единичные значения на переходах в состояние ai. Значение Y(ai) определяется следующим образом: если на всех переходах в состояние ai, ai € A, формируется один и тот же выходной набор Y(am,ai), то полагается Y(ai) := Y(am,ai), иначе полагается Y(ai) := пустое множество. Теперь задачу кодирова ния внутренних состояний совмещенной модели конечного автомата можно сформулировать следующим образом. Задача 1. Ввести минимальное число R дополнительных переменных e1,...,eR и закодировать строки матрицы W таким образом, чтобы все строки матрицы W были взаимно ортогональны. Для решения задачи 1 строится граф H ортогональности строк матрицы W. Вершины графа H соответствуют строкам матрицы W (то есть внутренним состояниям конечного автомата). Две вершины i и j графа H соединяются ребром, если строки i и j матрицы W ортогональны между собой. Теперь задача 1 сводится к нахождению в графе H минимального числа T полных подграфов H1,...,HT, вершины которых не пересекаются, и приписывании этим подграфам двоичных кодов, определяемых значениями переменных e1,...,eR. На основании вышеизложенного для решения задачи 1 может быть предложен следующий алгоритм. Алгоритм 1
Рассмотренный метод без всяких изменений может быть примен╦н при кодировании внутренних состояний конечных автоматов моделей AE и BF. При кодировании внутренних состояний конечных автоматов совмещ╦нной модели AD троичная матрица W будет содержать столбцы, соответствующие только переменным множества Е. Метод синтеза совмещенных моделей конечных автоматов Метод синтеза совмещ╦нных моделей конечных автоматов рассмотрим на примере модели ADE, а затем уточним этот метод для моделей AD, AE и BF. Использование совмещенной модели автоматов преследует две основные цели:
Обе цели достигаются пут╦м широкого использования моделей автоматов классов D и E, а также операции расщепления состояний. В предлагаемом ниже алгоритме синтеза расщепление состояний прекращается, как только это приводит к увеличению значения R, а в качестве окончательного принимается решение, которое последний раз вызвало уменьшение R. Пусть A - множество всех внутренних состояний конечного автомата. Определим множество AE, AE Н A, состояний автомата класса E, то есть множество состояний, коды которых определяются входными наборами. Обозначим через U(ai) множество всех условий переходов в состояние ai, ai € A: U(ai) = {X(am,ai) | am € B(ai)}, (1) где B(ai) - множество состояний, переходы из которых оканчиваются в состоянии ai. Состояние ai, ai € A, является состоянием автомата класса E, то есть ai € AE, если выполняются условия: |U(ai)| = 1 и (2) Выполнение (2) обеспечивает, что все переходы в состояние ai осуществляются по одному и тому же условию перехода, а выполнение (3) обеспечивает, что условия переходов в состояние ai не вызывают переходов в другие состояния автомата. Удовлетворение условиям (2) выполняется пут╦м расщепления состояний. Удовлетворение условиям (3) осуществляется пут╦м введения дополнительных переменных обратных связей и соответствующих им элементов памяти для различия кодов внутренних состояний автомата. Пусть UE(ai) - множество условий переходов в состояние ai, ai € A, которые не встречаются на переходах в другие состояния, то есть для которых выполняется условие (3), UE(ai) Пусть V(ai) - множество наборов выходных переменных, формируемых на переходах в состояние ai, ai € A: V(ai) = {Y(am,ai) | am € B(ai)}. (4) Состояние ai, ai € A, является состоянием автомата класса D, то есть ai € AD, если выполняются условия: |V(ai)| = 1 и (5) Выполнение условия (5) обеспечивает, что на всех переходах в состояние ai формируется один и тот же выходной набор, а выполнение (6) обеспечивает, что выходной набор V(ai) не встречается на переходах в другие состояния конечного автомата. Пусть VD(ai) - множество наборов выходных переменных, формируемых на переходах в состояние ai, ai € A, которые не встречаются на переходах в другие состояния, то есть VD(ai) - подмножество множества V(ai), VD(ai) Определим стоимость S(ai) расщепления состояния ai как число строк, на которое увеличивается таблица переходов в результате расщепления состояния ai, ai € A*D S(ai) = |V(ai) √ 1|·|P(ai)|, если ai € A*,D, (7) где P(ai) - множество переходов из состояния ai. В процессе синтеза конкретное значение S(ai) выбирается в зависимости от того, каким образом производится расщепление: по выходным (ai € A*D) или по входным (ai € A*E) наборам. На основании вышеизложенного, обобщ╦нный алгоритм синтеза совмещенной модели конечных автоматов ADE можно представить следующим образом. Алгоритм 2
Отметим, что в начале выполнения алгоритма 2 значение R* принимается заведомо большим, чем необходимо, поэтому в пункте 3 по крайней мере один раз выполнится запоминание результатов синтеза. Пример. Рассмотрим работу алгоритма 2 на примере синтеза совмещ╦нной модели конечного автомата Мили, таблица переходов которого приведена в табл. 1. Решение задачи 1 приводит к определению значения R* = 2. Множества V(ai), VD(ai), U(ai) и UE(ai) для данного примера приведены в табл. 2, на основании которых определяются следующие множества: AD = {a4}; A*D = {a3,a5}; AE = {a1,a2,a3} и A*E = {a4,a5}. Для расщепления выбирается состояние a5, поскольку |VD(a5)| = |UE(a5)| = max = 3. Результаты расщепления состояния a5 по выходным наборам множества V(a5) приведены в табл. 3. Матрица W, построенная для решения задачи 1, приведена в табл. 4 (первые восемь столбцов). Граф H ортогональности строк матрицы W показан на рис. 2. Таблица 1. Таблица переходов исходного конечного автомата
Таблица 2. Множества V(ai), VD(ai), U(ai) и UE(ai)
Таблица 3. Таблица переходов после расщепления состояния a5
Таблица 4. Матрица W для кодирования внутренних состояний
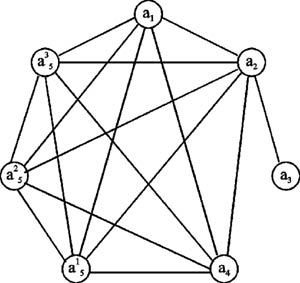
Рисунок 2. Граф H ортогональности строк матрицы W
Вначале из графа H удаляется вершина a2, связанная со всеми остальными вершинами графа. Затем в графе H последовательно выделяются два полных подграфа H1 и H2, для которых A1 = {a1, a4, a5¹, a5², a5³} и A2 = {a3}. Поскольку два подграфа можно закодировать одной двоичной переменной, то имеем R = 1. Дальнейшее расщепление состояний не приводит к уменьшению R, поэтому полученное решение принимается за окончательное. В матрицу W добавляется один столбец, соответствующий дополнительной переменной e1. Строки таблицы W, соответствующие подграфу H1, кодируются нулевым значением переменной e1, а подграфу H2 - единичным. На основании содержимого строк матрицы W определяются следующие значения кодов внутренних состояний автомата: K(a1) = ¯g4╥¯z1╥¯z2╥¯z3╥¯z4╥¯e1; Структурная таблица переходов представлена в табл. 5, на основании которой составляются следующие логические уравнения реализуемых функций: d1 = ¯g4╥¯z1╥¯z2╥¯z3╥¯z4╥¯e1╥¯x1 + g1╥¯z1╥¯z2╥¯z3╥z4╥¯x1; Таблица 5. Структурная таблица переходов
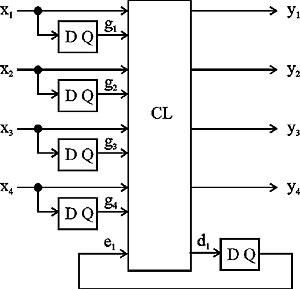
Окончательная реализация совмещ╦нной модели ADE показана на рис. 3. Рисунок 3. Реализация совмещ╦нной модели ADE
Если для всех ai, ai € A, положить U(ai) := пустое множество, то алгоритм 2 без всяких изменений может быть примен╦н для синтеза конечных автоматов совмещенной модели AD. Если для всех ai, ai € A, положить V(ai) := пустое множество, то алгоритм 2 также без всяких изменений может быть примен╦н для синтеза совмещ╦нной модели AE. Для автоматов типа Мура возможно построение только одной совмещ╦нной модели BF. Дело в том, что временные параметры выходных сигналов автомата класса C существенно отличаются от временных параметров выходных сигналов автоматов классов B и F [3]. Поэтому, в общем случае, автомат класса C нельзя совмещать в рамках одной модели с автоматами классов B и F. Метод синтеза совмещ╦нной модели BF полностью совпадает с рассмотренным выше методом синтеза совмещ╦нной модели AE. Отличие заключается только в том, что вместо исходного автомата типа Мили рассматривается автомат типа Мура. Переход от автомата типа Мили к автомату типа Мура можно выполнить с помощью алгоритма 2 работы [2]. Результаты экспериментальных исследований метода синтеза совмещенных моделей конечных автоматов Метод синтеза совмещ╦нных моделей реализован программно в пакете ZUBR. Эффективность метода сравнивалась с методами синтеза пакета MAX+PLUSII фирмы Altera для семейств MAX 9000 и FLEX 10K, а также методами синтеза пакета WebPack фирмы Xilinx для семейств XC 9500 и VIRTEX2. В качестве исходных данных использовались эталонные примеры конечных автоматов, разработанные в центре MCNC (Microelectronics Center of North Carolina) [4]. Результаты сравнения стоимости реализации конечных автоматов, синтезированных с помощью метода синтеза совмещ╦нных моделей и методов пакета MAX+PLUSII для семейств MAX 9000 и FLEX 10K представлены соответственно в табл. 6 и 7, где Name - имя эталонного примера; L, N, M и P - число входов, выходов, внутренних состояний и переходов конечного автомата, соответственно; C1 - число используемых макроячеек ПЛИС при синтезе конечного автомата с помощью метода синтеза пакета MAX+PLUSII для семейства MAX 9000; C2, C3 и C4 - число используемых макроячеек ПЛИС семейства MAX 9000 при синтезе конечного автомата с помощью метода синтеза совмещ╦нной модели ADE, AD и AE, соответственно; C5, C6, C7 и C8 - то же, но для семейства FLEX 10K. Таблица 6. Сравнение метода синтеза совмещенных моделей конечных автоматов с методами пакета MAX+PULSII для семейства MAX 9000
Таблица 7. Сравнение метода синтеза совмещенных моделей конечных автоматов с методами пакета MAX+PULSII для семейства FLEX 10K
Анализ табл. 6 и 7 показывает, что использование совмещ╦нных моделей конечных автоматов и соответствующих методов синтеза позволяет уменьшить число задействуемых макроячеек ПЛИС, в среднем, в 1,71√3,79 раза, а для отдельных примеров - в 8 раз. В табл. 8 приведены результаты сравнения быстродействия синтезированных конечных автоматов для моделей AD и AE, где D1 - максимальная задержка в наносекундах прохождения сигналов со входа на выход схемы при использовании пакета WebPack для семейства XC 9500; D2 и D3 - то же, но при использовании метода синтеза совмещ╦нных моделей AD и AE, соответ ственно. Анализ табл. 8 показывает, что метод синтеза совмещ╦нных моделей позволяет повысить быстродействие конечных автоматов, в среднем, в 2,14 раза, а для отдельных примеров - почти в 6 раз. Таблица 8. Сравнение быстродействия конечных автоматов для семейства XC 9500
Литература
|