

ПОСЛЕДОВАТЕЛЬНОСТЬ ВКЛЮЧЕНИЯ ИСТОЧНИКОВ ПИТАНИЯ В СИСТЕМАХ С НЕСКОЛЬКИМИ ПИТАЮЩИМИ НАПРЯЖЕНИЯМИ
Продолжение. Начало статьи в №2 2005 г.
E. Микроконтроллеры
Микроконтроллеры являются одним из наиболее универсальных компонентов для построения секвенсеров. Если источники питания имеют входы разрешения, то для управления ими можно с легкостью использовать обычные порты ввода-вывода (GPIO) микроконтроллера. Если же таких входов у источников питания нет, то можно использовать MOSFET либо ключ управления питанием, управляемый либо с порта ввода-вывода, либо сигналом ШИМ (PWM).
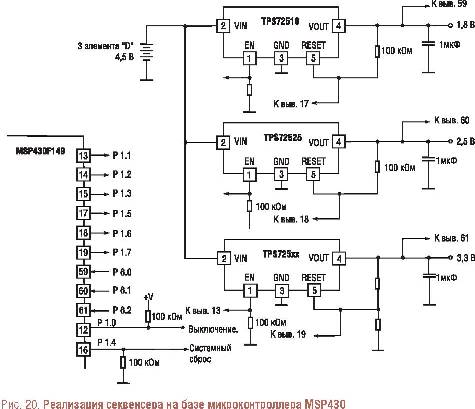
В качестве микроконтроллера в нашем примере использован MSP430, 16-битный RISC процессор, содержащий несколько аналоговых периферийных модулей и отладочный JT AG-интерфейс. В схеме, изображенной на рис. 20 использован LDO Стабилизатор семейства TPS725xx для получения напряжений 3,3 В, 2,5 В и 1,8 В от источника питания. LDO-стабилизаторы этого семейства имеют вход разрешения и функцию сброса. Эта схема легко может быть расширена для получения любого требуемого количества питающих напряжений. микроконтроллер MSP430 осуществляет мониторинг контрольного сигнала, принимая на его основе решение о включении питания на соответствующей шине. Для целей правильного включения питания наиболее часто используемыми контрольными сигналами являются время и напряжение.
Реализация последовательной схемы
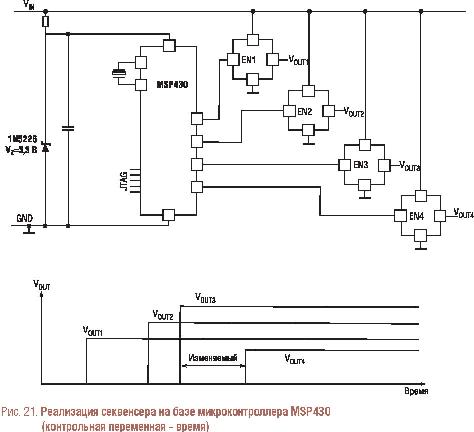
Когда время используется в качестве контрольной переменной, сначала разрешается питание на первой шине, далее, после фиксированной паузы разрешается питание на следующей шине. Процесс продолжается до тех пор, пока не будут включены все шины питания. Микроконтроллер MSP430 обеспечивает формирование временных интервалов и включение источников питания (рис. 21).
Если в качестве контрольной переменной используется время, то сначала активизируется первая шина питания, далее нарастание напряжения на ней контролируется встроенным аналогово-цифровым преобразователем. Когда уровень напряжения на шине достиг заданного, разрешается включение следующей шины питания, при этом нарастание напряжение на ней также контролируется. Процесс продолжается до тех пор, пока все шины питания не будут включены (рис. 22). При использовании напряжения в качестве контрольного параметра можно применять выводы портов общего назначения (GPIO) либо выход ШИМ сигнала (PWM) в качестве сигнала разрешения, в зависимости от того, требуется ли формирование конкретной формы сигнала на шине. Кроме того, можно использовать временное и амплитудное слежение одновременно.
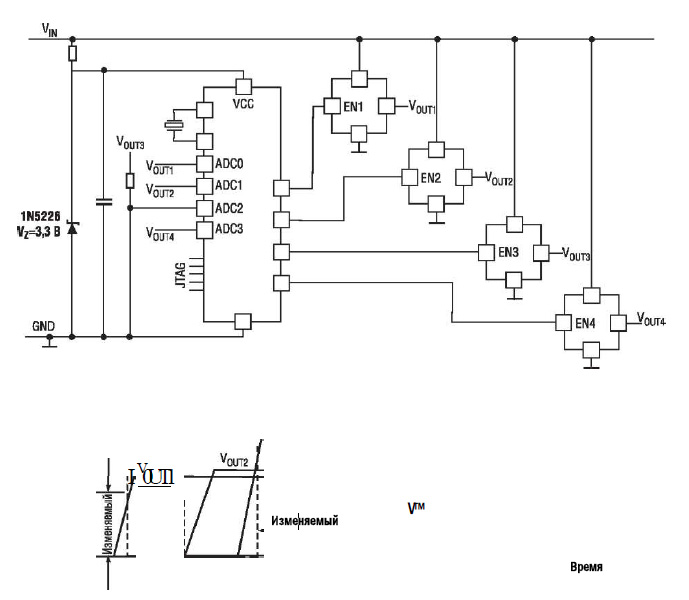
Рис. 22. Реализация секвенсера на базе микроконтроллера MSP430 (контрольная переменная - напряжение)
Как только MSP430 включит все шины питания и осуществит системный сброс, он переходит в режим слежения, в котором производит постоянный мониторинг выходных напряжений с помощью выходов либо цепей сброса — в зависимости от того, выбрано в качестве контрольного параметра время или напряжение. При возникновении неисправности микроконтроллер входит в процедуру обработки ошибок. Наиболее простой в диагностике неисправностью является отсутствие напряжения на шине, также могут быть обнаружены другие неисправности — например, превышение либо занижение уровня выходного напряжения. Действия, осуществляемые при обнаружении неисправности, целиком зависят от конкретной задачи. Наиболее простое действие — обесточивание всех цепей питания, но программируемость микроконтроллера позволяет пользователю реализовать гораздо более сложные алгоритмы контроля и управления.
Контроль за выключением питания может осуществляться как в обратной последовательности, так и в любом другом порядке, в зависимости от системных требований. Одним из полезных дополнений к процедуре выключения питания может быть включение фиктивной нагрузки для разряда выходных конденсаторов фильтра.
V. РЕАЛИЗАЦИЯ СЕКВЕНСЕРОВ ПИТАНИЯ НА БАЗЕ КОНТРОЛЛЕРОВ ИМПУЛЬСНЫХ ИСТОЧНИКОВ ПИТАНИЯ, ПРЕОБРАЗОВАТЕЛЕЙ И МОДУЛЕЙ
A. Запуск с предварительным смещением и синхронное выпрямление
Многие импульсные источники питания для повышения эффективности используют синхронное выпрямление, как изображено на упрощенной схеме синхронного понижающего преобразователя на рис. 23. В этом примере напряжение Увв сначала подается на ядро через цепочку последовательно включенных диодов, преобразователь питания ядра при этом выключен. Такая схема, при работе которой, напряжение на выходе преобразователя появляется до того, как он включен, называется «предварительное смещение» (prebias). После того, как ШИМпреобразователь включен, он плавно запускает «верхний» МОП-ключ, а его коэффициент заполнения (D) начинает постепенно нарастать от нуля до некоего значения, при котором наступает стабилизация. Однако, если при запуске МОПключ синхронного выпрямителя (SR) открыт, в то время, как «верхний» МОП-ключ закрыт (коэффициент заполнения для МОП-ключа SR равен 1-D), то через открытый SR-ключ течет ток (через индуктивность), просаживая как питание ядра, так и портов ввода-вывода. Для исключения такой ситуации были специально разработаны ШИМ-контроллеры для работы с предварительным смещением, отключающие SR-ключ во время запуска. До момента включения ключа синхронного выпрямления ток индуктивности течет через паразитный диод МОП-ключа, а не через его канал. После завершения процедуры плавного запуска ключ синхронного выпрямления работает в обычном режиме.
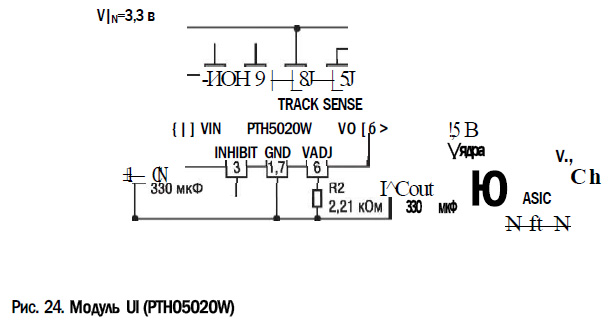
Необходимость в синхронных преобразователях с предварительным смещением возрастает в тех случаях, когда требуется последовательная схема включения источников для питания некоторых специализированных ИС (ASIC), в которых из-за наличия цепей утечки часть напряжения питания портов ввода-вывода попадает на ядро до того, как источник его питания разрешен. На рис. 24 проиллюстрирован пример такого случая при использовании модуля серии PTH. Модули этой серии используют синхронное выпрямление, таким образом, они могут потреблять ток по выходу во время работы, но 3,3 и 5вольтовые версии отключают ключ синхронного выпрямления во время запуска и при отключении модуля при помощи входа запрета «Inhibit». В схеме, изображенной на рис. 24, модуль Ul (PTH05020W) обеспечивает питание 2,5 В для ядра.
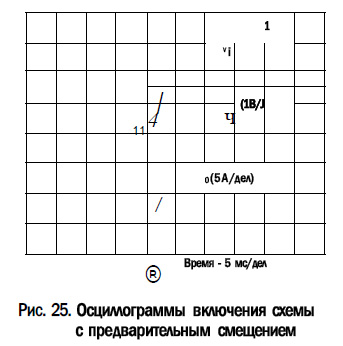
На рис. 25 показаны осциллограммы сигналов для этой схемы при подаче входного напряжения. Заметно, что Vo растет после подачи напряжения VIN из-за наличия утечек через прямосмещенные диоды внутри ASIC. Следует отметить, что выходной ток (Io) незначителен до тех пор, пока напряжение Vo не превысит напряжения предварительного смещения (точка A). С этого момента ток Io становится положительным.
B. Контроллеры DC-DC
Реализация зависимой схемы
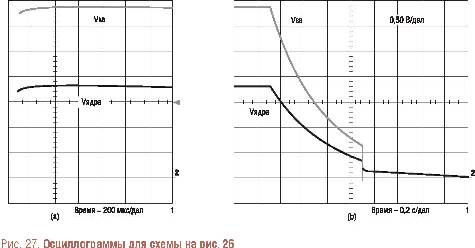
В зависимой схеме включения источников питания несколько шин включаются одновременно, нарастание напряжения на них происходит пропорционально. Такую функцию можно реализовать с помощью нескольких контроллеров, использующих общий конденсатор плавного запуска. В схемном решении на рис. 26 (осциллограммы приведены на рис. 27) использованы два синхронных понижающих преобразователя TPS40051 с широким диапазоном входных напряжений — от 8 до 40 В. Эти контроллеры управляют синхронными выпрямителями и используют регулировку по входному напряжению. В нашем примере напряжение питания портов ввода-вывода 3,3 В, а напряжение питания ядра 1,8 В.
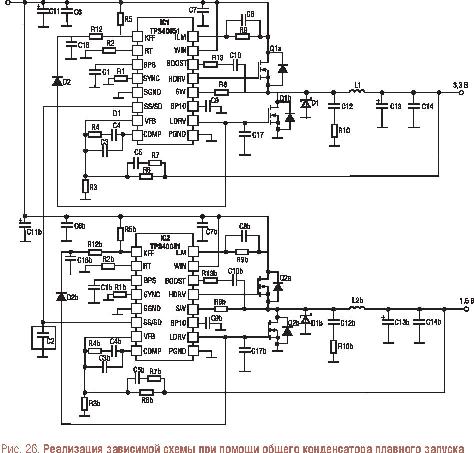
Плавный запуск задается при помощи заряда внешнего конденсатора C2 через встроенный источник тока величиной 2,3 мкА. Далее нарастающее на C2 напряжение подается на неинвертирующий вход усилителей ошибки обеих микросхем (кроме этого, на них подается напряжение обратной связи и опорный сигнал 700 мВ). Как только напряжение на C2 превышает 700 мВ, для регулировки напряжения используется встроенный источник опорного напряжения. Для эффективного контроля нарастания выходного напряжения, время плавного запуска должно быть больше, чем постоянная времени, образуемая выходным дросселем и конденсатором.
Таким образом, для нашего примера,
tSTART > 2п L1x C13 (секунд)
а емкость плавного запуска рассчитывается как
С учетом того, что ток заряда конденсатора плавного запуска равен 2,3 мкА для каждого из контроллеров.
C. Преобразователи DC/DC
Реализация одновременной схемы
Как уже было указано ранее, задачей одновременной схемы является обеспечение минимальной разности потенциалов между шинами питания при нарастании напряжения. На рис. 28 приведена реализация такой схемы на базе преобразователей со встроенным силовым ключом (SWIFT) и ключом синхронного выпрямления. Микросхема IC1 обеспечивает питание портов ввода-вывода величиной 3,3 В, а IC2 обеспечивает питание ядра величиной 1,5 В. Оба преобразователя используют общий конденсатор плавного запуска (C14) для формирования идентичной формы нарастания выходного напряжения. Контроллеры используют обратную связь по напряжению. Преобразователь IC2 является ведущим. Его выходное напряжение установлено делителем R14/R12 на уровне 1,5 В. Вывод установления питания (PGOOD) используется для управления ведомым преобразователем IC1 при помощи делителя напряжения в цепи обратной связи.
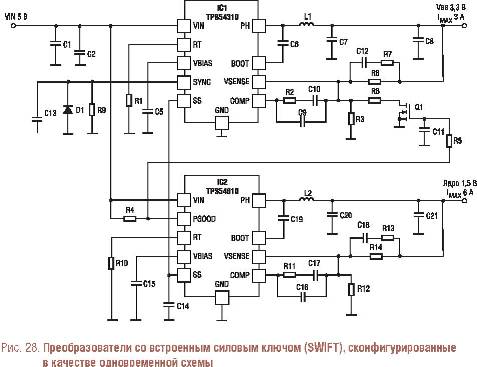
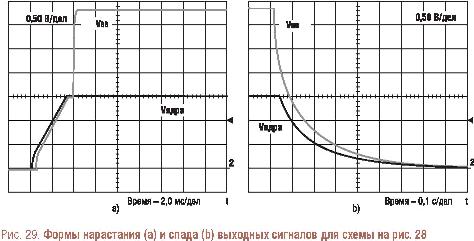
Во время включения (см. рис. 29a), оба выходных напряжения нарастают одинаково до напряжения 1,5 В, форма определяется зарядом конденсатора плавного запуска. Напряжение определяется делителем R14/R12 для IC2 и R8/R3 для IC1. Во время включения выход установления питания (PGOOD) микросхемы IC2 находится в состоянии логического нуля, транзистор Ql при этом выключен, до тех, пока напряжение на выходе IC2 не достигнет величины 90% от конечного значения. После того, как Компаратор преобразователя IC2 определит наличие на выходе напряжения в 90% или более от требуемого, выход PGOOD переходит в третье состояние, на затвор транзистора Q1 подается напряжение через цепь R4, R5 и C11. По достижении напряжением на затворе Q1 порогового значения 1,6 В (типовое значение), он начинает открываться и подключает R6 параллельно R3. При этом выходное напряжение микросхемы IC1 возрастает до величины 3,3 В.
В данной схеме использован полевой транзистор широкого применения BSS138 с типовым значением напряжения порога Vgsth = 1,6 В. Сопротивление канала в открытом состоянии RDS(on)<10 Ом (по сравнению с сопротивлением R3 и R6 им можно пренебречь) не влияет на расчет выходного напряжения.
Сопротивление резисторов в делителе рассчитывается исходя из требуемого выходного напряжения следующим образом:
А. Формула для Уядра
Положим R8 = 27.7 кОм
Тогда R3 = 40,2 кОм
В. Формула для Увв
VEg= 3,3 В, таким образом
Кх = 10,22 кОм
С. Формула для R6
таким образом,
R6 = 13,5 кОм
Выход установления питания PGOOD преобразователя IC2 переходит в состояние логического нуля, когда напряжение Vядра во время выключения падает ниже, чем 90% от установленного значения (рис. 29b). При этом через R5 разряжается С11 и затвор полевого транзистора Q1. Как только напряжение на затворе Ql падает ниже порогового (типовое значение 1,6 В), R6 отключается от цепи делителя обратной связи. При этом установленное выходное значение напряжения преобразователя IC1 падает до 1,5 В и спад напряжения питания портов ввода-вывода происходит одновременно со спадом напряжения питания ядра. Однако, следует обратить внимание, что формы спада неидентичны, они зависят от энергии, запасенной в конденсаторах фильтров и от тока нагрузки. Для исключения такой ситуации следует использовать следящие SWIFT-преобразователи.
Отличительной особенностью данной схемы является тот факт, что оба преобразователя работают на одинаковой частоте, задаваемой ведущим преобразователем IC2 на уровне 700 кГц. Микросхема IC1 запускается на частоте приблизительно 630 кГц, т.е. на 10% ниже частоты преобразования IC2. Как только IC2 выходит в рабочий режим, она синхронизирует IC1 через вход SYNC. Диод Dl ограничивает амплитуду отрицательных выбросов на входе SYNC.
Реализация последовательной схемы
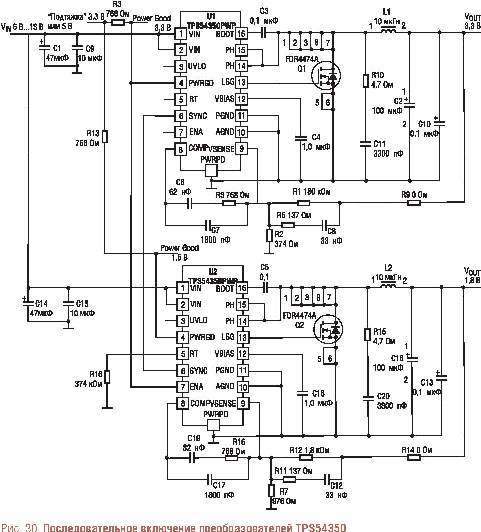
На рис. 30 показана реализация сдвоенного источника питания с последовательным включением на базе DC-DC преобразователя TPS54350. В схеме использован выход установления питания power good источника питания портов ввода-вывода для разрешения источника питания ядра. Как только источник питания портов установился, выход PWRGD переходит из состояния логической единицы в высокоимпедансное состояние (см. рис. 31). Микросхема TPS54350 имеет встроенный «подтягивающий» резистор на входе разрешения (ENA), таким образом, внешняя «подтяжка» этого входа не требуется. Как уже было указано в предыдущем разделе, основной проблемой при использовании метода «power good — enable» является выключение. Преимущественно требуется выключать питания в обратном включению порядке. В данном случае из-за различных токов нагрузки такая последовательность не может быть гарантирована.

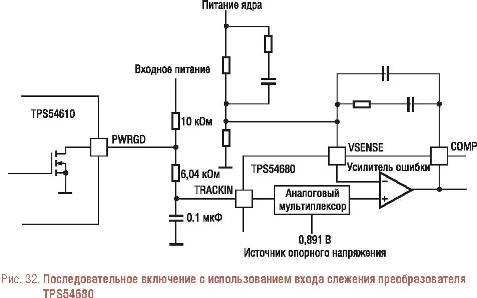
Другим способом реализации последовательной схемы является соединение выхода установления питания «power good» ко входу слежения TRACKIN преобразователя TPS54680 через резистор и конденсатор (рис. 32) [10]. Преобразователь TPS54680 был разработан для применений со строгими требованиями к последовательности подачи питающих напряжений. Микросхема имеет вход слежения TRACKIN, облегчающий построение секвенсеров по различным схемам включения. Этот вывод микросхемы является входом для аналогового мультиплексора, сравнивающего напряжение встроенного источника опорного напряжения 0,891 В с напряжением на входе TRACKIN и подключающего наименьшее из этих напряжений к неинвертирующему входу усилителя ошибки. Когда напряжение на входе TRACKIN меньше напряжения встроенного ИОН, то напряжение входа TRACKIN является опорным для преобразователя. Осциллограммы нарастания и спада выходных сигналов приведены на рис. 33.
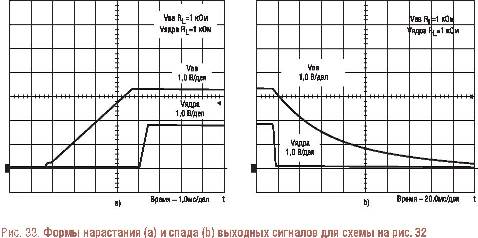
Как показано на рис. 33a, первым нарастает напряжение питания портов ввода-вывода 3.3 В. Когда оно достигает номинального значения, выход с открытым коллектором PWRGD «отпускает» вход TRACKIN, при этом начинает нарастать напряжение питания ядра с постоянной времени, задаваемой RC цепью. Конденсатор емкостью 0,1 мкФ используется для минимизации пускового тока во время запуска источника питания ядра. Выход PWRGD переходит в состояние логического нуля и переводит в это состояние вход TRACKIN когда вход SSENA микросхемы TPS54610 переведен в состояние логического нуля либо когда выходное напряжение составляет менее 90% от установленного. В идеале, снятие питаний ядра и портов должно происходить в порядке, обратном включению. Если в тот момент, когда питание портов ввода-вывода отключается, нагрузка на выходе отсутствует либо недостаточна, в микросхеме TPS54680 предусмотрена возможность переноса энергии из выходного во входной конденсатор. На рис. 33b показан процесс выключения при нагрузке 1 кОм на обоих выходах.
Окончание следует.